树莓派打造《侏罗纪世界》机械迅猛龙:从仿生骨架到AI视觉追踪全解
机械仿真迅猛龙,我梦想中的机械恐龙,诞生于我最爱的宇宙:侏罗纪世界。
项目物料清单
硬件
- Raspberry Pi 3 Model B × 1
- 16通道舵机控制器(如 Adafruit 同类产品) × 1
- 40kg 舵机 × 5
- MG996R 舵机 × 2
- PET-G 耗材 × 2
- USB 转音频模块 × 1
- 螺丝、螺母(M8 / M5 / M4 / M3 / M2) × 100
- 4mm 胶合板 × 1
- 10mm MDF板 × 1
- 8mm 螺纹杆 × 2
- SG90 微型舵机 × 3
软件应用与在线服务
- depthai 操作系统
- Thonny IDE
工具
- 多功能螺丝刀套装
- 36W 激光切割机
- Artillery Sidewinder X2 3D打印机
背景与灵感
迅猛龙(Velociraptor)是上白垩纪(约7500万至7100万年前)的一种掠食性驰龙类恐龙。而我想要的,是把它从化石与银幕中拉进现实,用机械骨骼和 AI 大脑赋予它第二次生命。
以下视频展示了这只机械仿生迅猛龙的测试过程:

这段视频展示了用树莓派驱动的迅猛龙原型机,从概念到现实的全过程。
第一部分:机械构造与传动
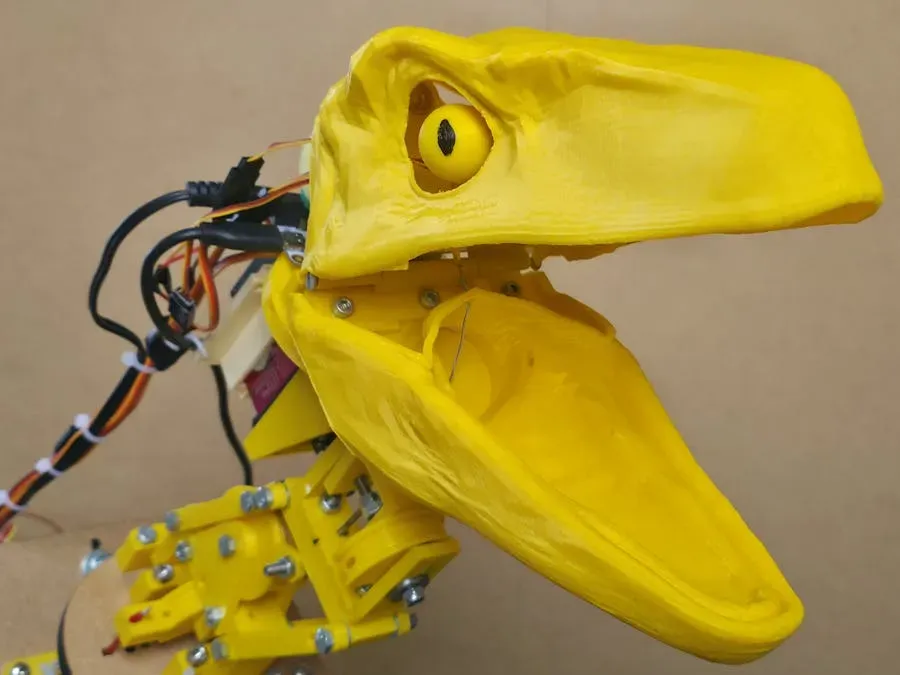
第一步:头部原型——从静态到动态
项目的起点是制作一个可动的恐龙头部。它采用 PET-G 材料通过 FDM 3D 打印而成,但我不想只得到一个静态雕塑,因此从设计之初就集成了可活动的眼球和开合式下颌。从最初的头部原型迭代到最终版本,这个过程十分迅速。
- 软件:全部在 Fusion 360 中完成设计。
- 激光切割:所有 MDF 和胶合板部件由 Ikier K-1 Ultra 36W 激光切割机制作。
- 3D 打印:所有打印件由 Artillery Sidewinder X2 3D 打印机完成。
第二步:脊柱与胸腔——混合骨架
承力骨架采用激光切割的 MDF 和胶合板,配合螺纹杆组装而成。这个方案简单却精巧,它允许轻松调节身体各段间距,同时保持了机器人底盘的刚需。脊椎的主体由四根钢制螺纹杆构成的框架担任,为所有肋骨和舱壁提供精确对齐的基础。
- 分段设计:隔板使整体结构保持有序。
- 稳定性:钢制螺纹杆提供纯塑料无法达到的刚性。
- 混合工艺:激光切割的胶合板与 MDF 舱壁提供高强重比,而 3D 打印的 PET‑G 组件则用于实现复杂的关节、头骨外壳和四肢造型。
第三步:肌腱驱动系统
这是整个项目中最具生命感的动画元素之一。为了避免将沉重的电机直接塞入关节,我设计了一套肌腱驱动系统,使用鲍登线缆(那些白色的管子)作为传力媒介。
- 质量集中:舵机全部安置在身体内部,极大减轻了颈部的转动惯量,使得头部动作更快、更自然。(注:在最终版中,头部运动由安装在头‑颈交界处的舵机直接驱动。)
- 精准牵引:线缆穿过隔板,将舵机摆臂的旋转转化为对头部或颈部特定部位的精确拉力。
第四步:颈部机构——优雅的并联连杆
在我看来,颈部是整个项目最迷人的机械结构。一套连杆机构与万向节组合,不仅让头部在颈部抬升时始终保持水平,还能完成复杂的横向扫描动作。主运动轴采用大扭矩 40kg 舵机,因为力臂很长,扭矩需求极高。
- 多自由度:并联连杆系统赋予颈部多个自由度,确保在垂直运动中头部朝向不变,运动轨迹更自然。
- 低摩擦:所有转动支点处均压入微型法兰轴承,最大限度降低阻力。
- 驱动方式:底盘内的高扭矩舵机通过鲍登式高张力线缆拉动,线缆穿过白色 PTFE 管,这些管子充当抗压外壳,通过专用打印张紧器和连接件固定在胶合板隔板上。
- 机械增益:颈部结构中集成了滑轮形零件,将线缆的直线张力转化为高扭矩旋转运动。
第五步:头骨总成与眼球机构
头骨不仅是外形,更是精密眼球与下颌执行器的外壳。3D 打印的头骨内部预留了密集的电子与机械安装点。
- 眼球追踪:由两个微型舵机倒置并排安装,通过细钢丝推杆控制眼球运动。眼球嵌件采用逼真的竖直爬行类瞳孔图案,视觉真实感大增。
- 下颌驱动:肌腱系统中的一根线缆锚定在下颌,穿过铰链支点,实现低延迟的开合控制。
头骨部件明细:
- 头骨外壳:PET‑G 3D 打印,集成附加执行器安装位。
- 下颌铰链:机械铰链系统,作为下颌转动主轴。
- 钢丝推杆:小直径钢丝连接微型舵机与眼球,支持双眼同步或独立追踪。
第六步:尾部关节与分段控制
尾巴采用多段肌腱驱动结构,从基座的大幅胶合板隔板逐渐收窄至尾端的小型 3D 打印部件。横向弯曲由一根锚定在尾尖的钢缆(肌腱)实现,线缆穿过 3D 打印的导轨和铰链。
- 主驱动:一台 DSSERVO DS3240MG(40kg)高扭矩数字舵机负责尾部动作。
- 结构稳定:舵机固定在胶合板矩形开槽内,并由定制 3D 打印支架锁定,确保重载下无位移。
- 精准限位:端点处使用扎带作为物理限位器,保证横向运动精确且无线缆滑移。
第七步:神经系统与供电
这张实拍展示的是“意大利面阶段”:纷繁的布线。橙色外壳内是树莓派 3 B+,通过专用的 16 通道 PCA9685 舵机驱动器为每颗电机生成 PWM 信号。电源线缆必须承受巨大的电流尖峰,尤其是多颗 40kg 舵机同时启动时。树莓派和全部舵机由一台 ATX 电脑电源统一供电,提供 5V、最大 25A 的稳定输出。
电子控制层经过专门设计,以应对大电流下的稳定需求:
- 主电源:标准 ATX 电源避免多舵机重载同时启动时的电压跌落。
- 舵机驱动器:PCA9685 16 通道 12 位 PWM 驱动器生成平滑的控制信号。
原型机“活”了
最终镜头中,机器人已准备好进行机械测试,标志性的掠食者轮廓展露无遗。我觉得它就像科幻片场里的道具,真实机械的魅力远远超过纯数字特效。
所有部件文件均可复用:塑料组件可通过导出 STL 文件 3D 打印,木质组件可通过 DXF 文件激光切割,而提供的 STP 文件可以直接导入 Fusion360 进一步修改。
第二部分:边缘 AI 控制系统
迅猛龙的大脑不止是机械联动,更搭配了一套基于视觉的边缘 AI 系统,使用 Luxonis OAK‑D 摄像头与树莓派、PCA9685 舵机控制器紧密协作。
环境准备
推荐使用 Raspberry Pi OS(64 位)或专为 AI 优化的 depthai 操作系统。需先下载镜像并写入 SD 卡。
https://drive.google.com/drive/folders/1O50jPpGj_82jkAokdrsG--k9OBQfMXK5
硬件配置(I2C)
PCA9685 通过 I2C 与树莓派通信,该接口默认禁用。使用 sudo raspi-config 进入 Interface Options,启用 I2C,重启后安装 i2c-tools,运行 sudo i2cdetect -y 1 检查是否出现地址 0x40。
安装系统依赖与 Python 开发库:
sudo apt update
sudo apt upgrade -y
sudo apt install -y libopencv-dev libatlas-base-dev
pip3 install opencv-python adafruit-circuitpython-servokit numpy
为使树莓派无需 root 权限与 OAK‑D 通信(使用高质量 USB 3.0 线缆连接),可添加 udev 规则:
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="03e7", MODE="0666"' | sudo tee /etc/udev/rules.d/80-movidius.rules
sudo udevadm control --reload-rules
sudo udevadm trigger
系统架构与技术解读
整个边缘 AI 系统由 OAK‑D 摄像头上的 Myriad X VPU 承担神经网络推理(MobileNet‑SSD),完全不消耗树莓派的 CPU 资源。检测到的人员空间坐标通过异步管道送入 PCA9685,生成对应的舵机控制信号。
为保证仿生运动自然顺滑,系统采用了多种运动稳定策略:
- 线性插值:当前位置平滑逼近目标值,避免生硬突变。
- 死区:忽略小于 0.5° 的微小坐标变化,保护舵机齿轮并消除持续抖动。
代码核心模块解析
以下是六个关键代码块的详细说明,完整源码可从文末链接获取。
模块 1:全局配置与动态初始化
定义舵机通道的角度范围、平滑因子与初始位置。所有活动舵机的起始姿态均从该配置表中读出,避免启动时未校准的乱动。
import asyncio
import depthai as dai
from adafruit_servokit import ServoKit
from pathlib import Path
import cv2
import time
SERVO_CONFIG = {
0: (60, 120, 0.04, 90),
1: (60, 120, 0.04, 90),
2: (50, 130, 0.05, 95),
11: (45, 150, 0.2, 150),
12: (45, 150, 0.2, 150),
15: (90, 200, 0.5, 90),
}
TARGET_TIMEOUT = 2.0
kit = ServoKit(channels=16)
target_positions = [SERVO_CONFIG.get(i, (0, 180, 0.5, 90))[3] for i in range(16)]
current_positions = list(target_positions)
模块 2:舵机运动引擎
以大约 50Hz 的频率异步更新所有舵机,将目标角度钳制在安全范围内,并通过线性插值实现平滑过渡。
async def servo_updater():
while True:
for channel, config in SERVO_CONFIG.items():
min_a, max_a, smoothing, _ = config
target = max(min_a, min(max_a, target_positions[channel]))
current = current_positions[channel]
diff = target - current
if abs(diff) > 0.5:
new_pos = current + (diff * smoothing)
current_positions[channel] = new_pos
kit.servo[channel].angle = new_pos
await asyncio.sleep(0.02)
模块 3:OAK‑D 视觉流水线
设置彩色相机、MobileNet 检测网络、对象追踪器等节点,并将所有繁重的视觉计算推至协处理器执行。
async def oakd_tracker():
pipeline = dai.Pipeline()
nnPath = str((Path(__file__).parent / Path('mobilenet-ssd_openvino_2021.4_6shave.blob')).resolve().absolute())
camRgb = pipeline.create(dai.node.ColorCamera)
camRgb.setPreviewSize(300, 300)
camRgb.setInterleaved(False)
camRgb.setColorOrder(dai.ColorCameraProperties.ColorOrder.BGR)
detectionNetwork = pipeline.create(dai.node.MobileNetDetectionNetwork)
detectionNetwork.setBlobPath(nnPath)
detectionNetwork.setConfidenceThreshold(0.5)
objectTracker = pipeline.create(dai.node.ObjectTracker)
objectTracker.setDetectionLabelsToTrack([15])
objectTracker.setTrackerType(dai.TrackerType.ZERO_TERM_COLOR_HISTOGRAM)
xout_rgb = pipeline.create(dai.node.XLinkOut)
xout_rgb.setStreamName("rgb")
xout_tracker = pipeline.create(dai.node.XLinkOut)
xout_tracker.setStreamName("tracklets")
camRgb.preview.link(detectionNetwork.input)
detectionNetwork.passthrough.link(objectTracker.inputTrackerFrame)
detectionNetwork.passthrough.link(objectTracker.inputDetectionFrame)
detectionNetwork.out.link(objectTracker.inputDetections)
objectTracker.out.link(xout_tracker.input)
camRgb.preview.link(xout_rgb.input)
模块 4:决策引擎(大脑)
这是仿生机器人的“狩猎本能”:锁定置信度最高的目标并忽略其他背景人员;若目标丢失超过 2 秒,自动回中进入待机模式。
代码中通过 .tryGet() 非阻塞方式获取数据,确保机械循环不收视觉计算阻塞。
核心行为包括:根据跟踪目标归一化坐标映射为 PAN 和 TILT 舵机角度,并在画面中绘出锁定框与待机提示。完整代码请参考原始项目。
模块 5:主编排
利用 asyncio.gather() 将舵机更新与视觉追踪两个异步任务并发执行。
async def main():
tasks = [servo_updater(), oakd_tracker()]
await asyncio.gather(*tasks)
模块 6:入口点与故障保护
运行时按 Ctrl+C 中断后,立即释放所有舵机扭矩,防止电机长时间堵转过热。
if __name__ == "__main__":
try:
asyncio.run(main())
except KeyboardInterrupt:
for i in range(16):
kit.servo[i].fraction = None
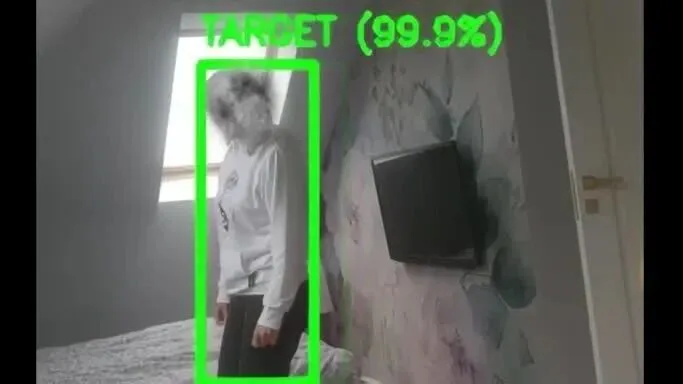
第三部分:迅猛龙的“视觉”
以下视频展示了 OAK‑D 摄像头视角下,迅猛龙如何锁定和追踪画面中的人员。
第四部分:终章与扩展
仿生迅猛龙的故事暂告一段落。下一步将为它开发更丰富的交互软件,并制作仿生外皮,让它从机械骨架蜕变为完整的生物。但那将是另一场挑战了。
可下载资源
- 头部壳体 FBX 文件(可用于 Blender 导出 STL 打印): https://hacksterio.s3.amazonaws.com/uploads/attachments/1955833/raptorheadshare_C9wknpUhrj.fbx
- 机械结构 STEP 文件(解压后导入 Fusion360): https://hacksterio.s3.amazonaws.com/uploads/attachments/1955832/raptormechanics_zzcBIp0C9g.zip
- 完整迅猛龙 FBX: https://hacksterio.s3.amazonaws.com/uploads/attachments/1956981/raptor_vfSfmCWgS8.fbx
电路原理图
全部代码可通过以下链接下载:
https://www.hackster.io/code_files/680667/download