树莓派Reachy Mini开源桌面机器人亲测:是学习利器还是隐私隐患?

最初在CES展会上看到英伟达首席执行官黄仁勋介绍Reachy Mini时,我一度认为那不过是一场精心策划的营销表演。在他的主题演讲中,这款小巧的机器人能够流畅地回应人类指令,转动头部查看墙上的任务清单,自主发送电子邮件,甚至通过一系列动作将手绘草图转化为建筑效果图。
随后,Hugging Face与Pollen Robotics向我寄送了一台Reachy Mini供实际测试。坦白说,想要复现黄仁勋演示中那种行云流水的交互效果,远比他口中“现在轻而易举”的论断复杂得多。
怀揣着对演示效果的期待,我欣然接受了这台评测设备,并在孩子们的协助下迅速完成了组装流程。
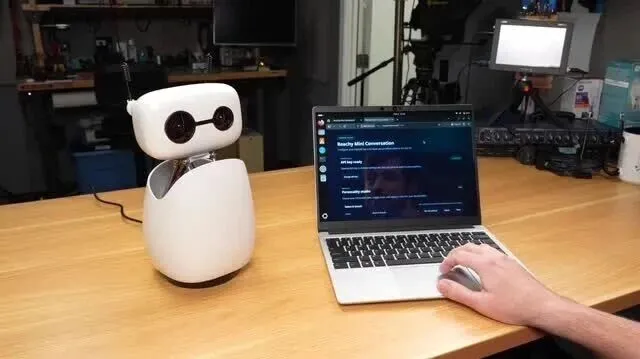
我决定首先尝试“对话应用”——这款应用能将Reachy Mini接入OpenAI,实现实时互动交流,我好奇孩子们与它对话会碰撞出怎样的火花。
接下来发生的一切完全出乎我的预料。
启动对话应用仅仅几秒钟后,我的女儿便主动向机器人告知了她的姓名。不到两分钟,她已经开始向机器人介绍兄弟姐妹的名字,并指着他们,示意Reachy转动摄像头,以便让这个电子伙伴“认识”正在与其交谈的对象。
(孩子们几乎瞬间就将Reachy Mini人格化了……)。
一种不安感促使我立即关闭了应用。我担心孩子们会向山姆·奥特曼执掌的公司泄露更多家庭隐私信息,毕竟该公司已从公开互联网内容中收集了海量数据。
我向孩子们解释道,对待机器人和对话式人工智能,应如同面对陌生人一般,不必过于坦诚和毫无保留。
当我再次开启应用后,孩子们开始故意混淆身份,试图让机器人分辨不清谁在讲话,情况有所改善。然而我依然隐隐觉得,倘若未来真的爆发机器人危机,我的孩子们恐怕坚持不了几分钟,就会变成维持机器运转的“生物电池”。
关于隐私与开源性
对于注重数据隐私的用户而言,Reachy Mini并非必须绑定OpenAI。我所测试的这款售价449美元的无线版本,其核心搭载了树莓派CM4计算模块。这意味着用户完全可以刷入自定义的操作系统与控制程序,并随意修改所有开源的reachy-mini代码。
它的设计初衷并非取代真实的人际互动,而是旨在激发对机器人技术与人工智能的学习热情。
至少在物理安全层面,Reachy Mini体型小巧、动力有限,理应不会像某些虚构的机器人(例如Blinky™)那样造成人身伤害。
产品特性解析
初次在家中搭建Reachy Mini时,我遇到了一些启动问题,最终排查发现是IPv6的DNS解析错误所致。
我的确对这款机器人API和网页界面“默认开放”的状态感到担忧,尤其是对话类应用会在未经用户明确许可的情况下,直接连接到OpenAI服务器。这种设计若不加以适当限制,很容易成为潜在的安全攻击入口。
组装体验分享
这款机器人仅提供套件版本,需要用户自行组装。所有塑料部件均采用ABS模压材质制成,结构坚固且拼接精密。
厂商随附赠予了一把HuiJiaQi品牌的螺丝刀,平心而论,其握持手感甚至优于我工作台上的部分工具,算是一个令人惊喜的小彩蛋。
’ fill=’%23FFFFFF’%3E%3Crect x=‘249’ y=‘126’ width=‘1’ height=‘1’%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
组装过程配有详尽的图文说明,我邀请孩子们一同参与,整个流程耗时不足两小时。机器人的“眼睛”实际上是16毫米C卡口鱼眼镜头,嵌于凸面玻璃之后,营造出类似《机器人总动员》中瓦力(Wall-E)的视觉深度感。真正负责图像捕捉的,是安装在面部中央的树莓派摄像头模块2。
已有开发者基于ESP32创建了点亮眼周灯光的项目,效果相当酷炫。不过,倘若Reachy的眼睛开始泛起红光,那我可真得提高警惕了!
如前所述,我的首次启动尝试仅能通过Mac上的Reachy Mini Control应用唤醒机器人,后续功能则全部失效。最终发现,必须确保Reachy通过IPv4协议连接互联网并启用DNS功能,整套系统方能正常运行。
我个人并不推崇必须联网才能正常运作的设备,尤其是集成了摄像头与麦克风、且目标用户包含儿童的产品。然而,Seeed Studios在其隐私条款中明确声明:
“Reachy Mini不会向Pollen Robotics或Hugging Face发送任何数据。除非您明确配置云服务,否则所有数据处理均在本地进行。”
因此,我所遭遇的联网问题,或许仅是软件层面的一个临时漏洞。
即便在没有互联网连接的情况下,我依然可以通过SSH访问设备。即使不使用官方应用程序,也能对机器人进行基础控制。这正是开源硬件带来的核心优势:用户拥有完全的自主权,可以选择使用方式,甚至能为树莓派刷入自己定制的系统。
在控制操作与部分应用的使用过程中,我也遇到了一些挑战,这与所使用的电脑及网络环境密切相关。例如,在我的Framework笔记本电脑上使用Firefox浏览器时,无法兼容所有应用;运行Control应用时,也无法获取实时的摄像头画面流。然而,在另一台运行Ubuntu 25.04系统及最新版Firefox的戴尔GB10主机上,一切功能却运行正常,这确实令人费解。
关键在于,用户不应期望这款机器人能像黄仁勋所描述的那样“开箱即用、轻而易举”。它本质上是一款为教育学习而设计的平台,而非插电即享智能服务的消费级家电。
设置与控制方式
令人欣慰的是,Reachy Mini配备了完整的Web API。我可以在局域网内的任意设备上通过访问reachy-mini.local:8000来向机器人发送指令。不过,如果能内置一些基础的安全验证机制(例如HTTP基本认证)将会更为稳妥。
控制方式丰富多样:包括Web API、网页界面(无线版支持)、适用于Mac/Windows/Linux的桌面端Control应用,甚至提供了一套完整的Python SDK。
我曾尝试在一台树莓派驱动的笔记本上测试桌面控制应用,以实现“用树莓派控制树莓派机器人”的构想,但官方尚未推出适用于Linux ARM架构的版本。总体而言,桌面应用在macOS上运行较为流畅,而在Linux系统上的表现则稍欠稳定。
“提线木偶”模式体验
展示Reachy Mini肢体动作能力最直观的方式,莫过于通过其界面一键安装“提线木偶”应用。
Linus Tech Tips频道的Riley曾在ShortCircuit节目中测试过此应用,效果颇为有趣。但他在短暂使用中可能并未注意到,需要单独开启一个网页界面来录制动作序列。
’ fill=’%23FFFFFF’%3E%3Crect x=‘249’ y=‘126’ width=‘1’ height=‘1’%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
开启录制功能后,用户可以用手直接移动Reachy的头部,应用程序理应记录下所有动作轨迹以供回放。但至少在我测试的这台无线版Reachy Mini上,动作回放的精准度存在些许偏差。
其他应用与潜力
Hugging Face平台托管了大量为Reachy Mini开发的应用。除了前述的对话应用和提线木偶应用,还有能跟随天线摆动节奏打拍的节拍器、手部追踪应用,以及通过扭动机器人右侧天线来调节频率的虚拟“收音机”等。
’ fill=’%23FFFFFF’%3E%3Crect x=‘249’ y=‘126’ width=‘1’ height=‘1’%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
这些演示应用充满趣味,也可作为开发自定义功能的起点。然而,它们与英伟达主题演讲中展示的水平仍有距离,再次强调,绝非“轻而易举”即可实现。不过,这些应用确实揭示了未来的潜力。Hugging Face曾发布一篇博客,详细阐述了他们如何构建智能代理演示,但这显然已远远超出了“简易使用”的范畴,尤其当用户希望所有功能都在本地运行时。
从最终实现的体验来看,Reachy Mini更像是一个能够表达情感的智能音箱,单论其功能集合,或许并不完全匹配449美元的售价。但其提供的学习体验和完全开源的自主掌控权,则可能让这个价格显得物有所值。
在互动性层面,Reachy Mini的表现力远超普通智能音箱。我的孩子们虽然也喜欢与Siri或Alexa玩耍,但在与Reachy Mini交流时,他们的状态更接近于与一个真实的伙伴对话。
快速的交互反馈,结合麦克风与摄像头的实时感知融合能力,共同营造出一种独特的沉浸感。
但这种体验需要强大的GPU算力作为支撑。目前,那些最具潜力的应用(例如对话应用)仍将核心计算任务置于云端。若要实现真正的突破,我期望所有功能都能在设备端本地运行,彻底摆脱对互联网连接的依赖。
遗憾的是,若想搭配DGX Spark这类本地算力方案,其成本将从449美元骤增至数千美元,这无疑大幅抬高了体验门槛。
最终结论
Reachy Mini是一款颇具创意的开源机器人产品。它提供299美元的基础版(需有线连接电脑使用)以及我测试的这款449美元的无线版本。
其配套软件与文档并非尽善尽美,但对于已经熟悉Linux系统和机器人技术的爱好者或学习者而言,它非常合适。如果Pollen Robotics、Hugging Face和矽递科技能够持续投入开发与维护,我相信Reachy Mini在机器人技术教育领域将拥有广阔的前景。