
在我的DIY项目中,我为自制的树莓派机器人Big Rob集成了一套高精度GPS导航系统,该系统同样以树莓派作为核心处理平台,实现了厘米级的精准定位功能。
核心硬件组件概述
该项目依赖于多个关键硬件组件,这些设备共同构建了精准定位的基础框架。
详细硬件清单
NV08C-CSM x 1 NV08C-CSM是一款高度集成的卫星导航接收器模块,能够高效处理多频段信号。
树莓派 Sense HAT x 1 该项目中,Sense HAT扩展板被用于实现导航相关的传感器数据采集和实时处理。
树莓派 3 Model B x 1 在系统构建中,我部署了三个树莓派模块,它们协同工作以支持整个导航架构。
项目起源与目标
这个树莓派机器人项目专注于搭建一套差分GPS系统,并利用RTK库实现高精度导航功能。
系统架构简介
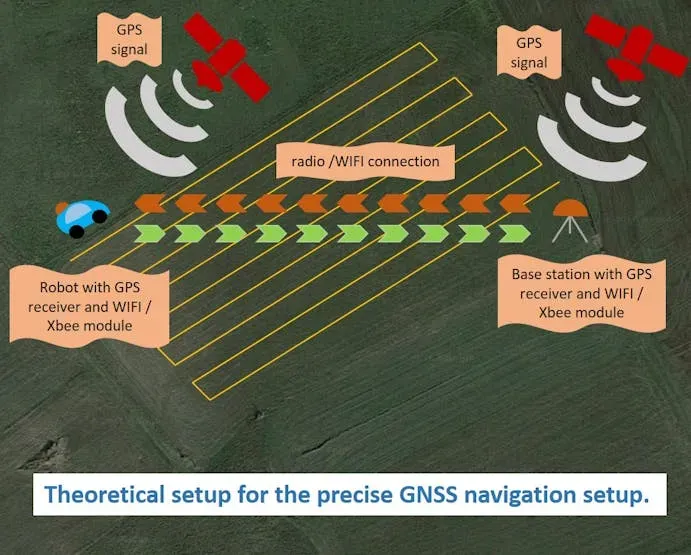
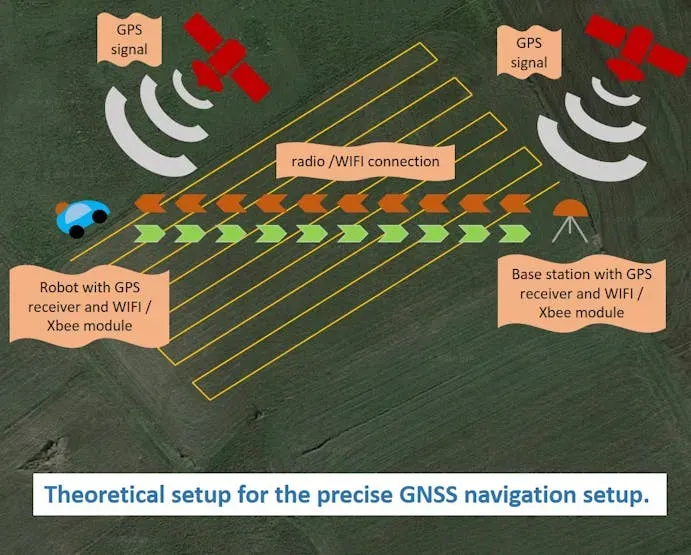
我为树莓派机器人开发了一套包含基站和移动单元的差分GPS系统,其中移动单元被集成到自制的Big Rob机器人内部。整个系统运作依赖于两个树莓派模块和RTK库的协同,详细工作原理在我的技术博客中有完整阐述。RTK解决方案的理论框架展示了移动单元(位于机器人上)与基站之间的通信机制,它们共同计算精确位置数据。所采用的GPS天线能够同时接收美国GPS和俄罗斯GLONASS的原始数据流,为定位提供多源输入。
基站设计与部署
我将基站安装在了一个防水且经济实惠的午餐盒内,这个容器能轻松容纳树莓派、移动电源以及GPS接收器模块。其成本低廉且易于改装,非常适合户外环境下的防水需求。下图展示了一台树莓派顶部装配GPS接收器的配置实例,该GPS模块是RasPiGNSS Aldebaran型号,根据RTK库的设置,它可以灵活充当基站或移动单元角色。

系统构建步骤详解
该项目涉及复杂的搭建过程,包括硬件组装和软件配置,需要一定的Linux操作经验。
我的博客提供了系统构建的逐步指南,涵盖了RTK库的详细配置方法。整个项目分为七篇技术文章,介绍如何利用两个树莓派模块,通过WIFI或XBee模块通信,实现精准的GNSS定位差分GPS方案。入门篇介绍了基础概念和系统概览,理论架构篇深入解析了设计原理,GPS天线配置篇强调了天线优化对快速定位的重要性。在硬件描述完成后,软件安装篇指导如何在Raspbian镜像上安装附加包。后续步骤包括RTK库安装后的基站配置、移动单元设置及其与基站的连接,以及XBee模块用于远距离数据传输的指南。
项目现状与未来规划
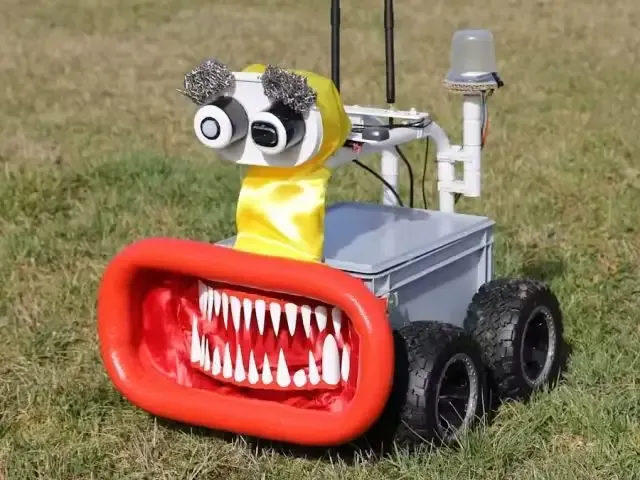
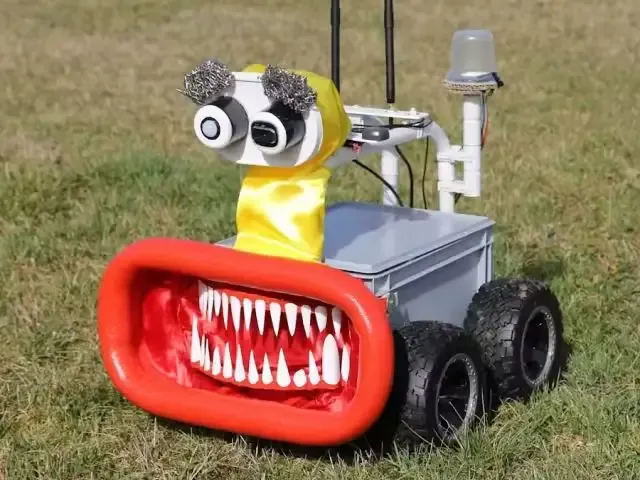
目前,我正在持续开发Big Rob机器人,它作为移动单元运行于户外环境,已实现了高精度导航能力。下图展示了机器人的当前状态,其用途尚未最终确定,但精准导航系统使其潜力广泛,例如可应用于安防监控、自动割草或实验性娱乐项目。
