
零重力环境呈现出独特而复杂的特性。大多数人难以真切想象太空任务中经历的失重状态,航天器内部加压大气与外部真空环境之间的差异尤为显著。即便是最微小的变量也可能引发显著影响。为深入理解这些效应,研发专用设备至关重要。
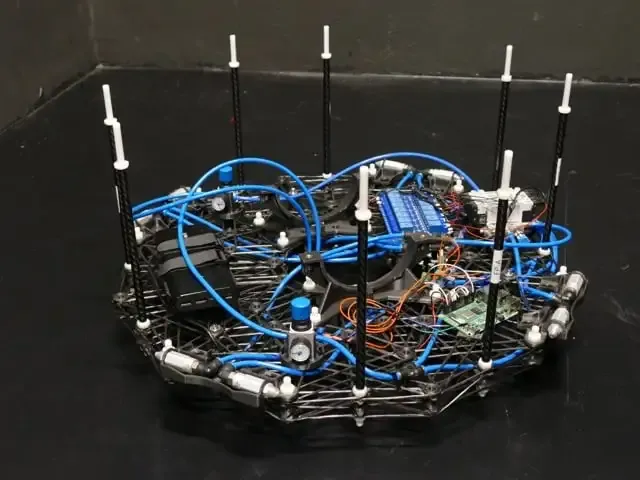
整个平台结构类似于一套精巧的K'Nex积木系统。
SpaceR团队负责人Barış Can Yalçin阐述道:“零重力实验室专为模拟航天器交会、对接、捕获以及其他交互场景而设计。它集成了先进基础设施,包括太空级照明条件、高精度动作捕捉系统、环氧树脂地板、机器人轨道安装点,以及支持集成机载计算机和大型实体模型的能力。这些功能使研究人员能够针对独特轨道场景开展广泛实验,实现与集成硬件及预建模软件组件的机器人混合仿真。该设施支持实时操作,并能精确模拟轨道机器人交互过程。”
SpaceR官网:https://www.spacer.lu/
满足太空探索的关键需求
太空产业规模持续扩大,此类实验室的建设旨在确保太空任务的安全性与可靠性。
Barış指出:“轨道服务、组装与制造(OSAM)、主动太空碎片清除(ADR)以及小行星采矿(AM)在科研和商业领域正日益重要。地球轨道上充斥着陈旧太空资产,而未来几年计划中的太空任务数量预计将急剧增长。此外,未来十年还计划在地球轨道建立多个空间站和大型结构,这些设施将部分在太空中组装或制造。这些活动要求更高程度的自主性和紧密交互。为确保在轨操作的安全可靠,发射前必须在地面验证制导、导航与控制(GNC)算法。因此,开发有效实验装置来测试算法的需求日益迫切。正因如此,学术界和工业界众多机构已开发并频繁使用悬浮平台模拟轨道机器人场景。”
树莓派的核心功能:平台控制与通信
树莓派在此系统中扮演关键角色。其体积小巧、成本低廉,配合庞大支持群体和优秀兼容性,以及与机器人操作系统(ROS)的协同能力,赋予树莓派多任务处理功能。图像处理、数据分析、控制算法和无线连接等特性,使其成为系统原型开发和嵌入式应用的理想选择。
系统构建的简易原理
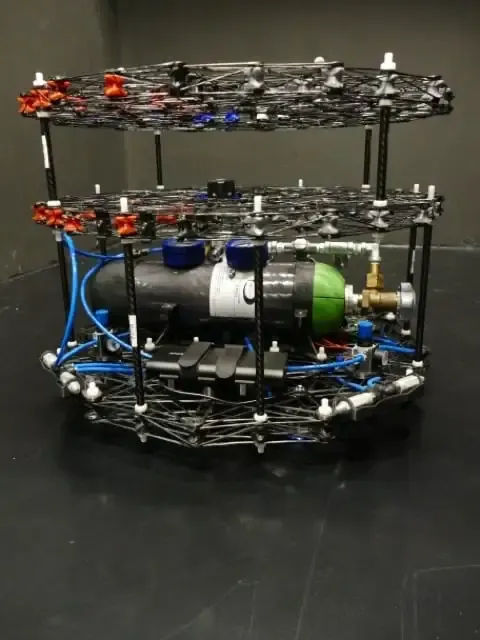
该系统的运作原理类似于气垫曲棍球桌。悬浮平台配备“气垫轴承”,使其像气垫船般轻微悬浮于地面,并通过喷嘴阵列实现三自由度(DoF)运动——沿X轴和Y轴平移,并绕Z轴旋转。要实现这一功能,平台必须保持轻量化设计。

实验中机器人协同作业的可视化呈现。
Barış解释道:“悬浮平台采用轻质碳纤维材料通过增材制造技术制成,这延长了实验持续时间,便于在零重力实验室中模拟复杂场景。平台越轻,消耗的压缩空气越少。此外,平台采用模块化设计,中间和上层板件易于拆卸,可用于携带仿真所需设备。其绳索状拓扑结构为安装多组件提供充足空间。3D打印支撑件能轻松集成到绳索框架中,支持组装额外设备如碎片清除系统、碎片模型、加油或对接模型、传感器等。每块板直径60厘米,板间距离可调,这为容纳多样化设备提供灵活性,使平台在各类应用中高度通用。”
实验成功验证与应用
悬浮平台已按预期成功运行。
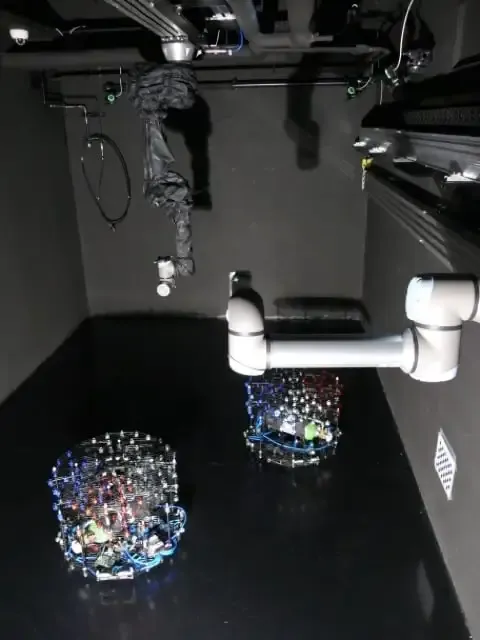
进行实验和测试的专业实验室环境。
Barış透露:“从实验数据来看,我们确认树莓派驱动的悬浮平台适用于模拟在轨场景。零重力实验室平台已成功实现软件在环(SIL)和硬件在环(HIL)功能,并完成多项任务导向的验证测试,如交会对接、在轨交互和着陆模拟。”
未来是否会有搭载树莓派的机器人接受测试?答案需由时间揭晓。
平台关键特性总结
该设计的核心部分已申请专利保护。
平台与实验室其他机器人实现无缝通信。
通信机制基于ROS系统构建。
电磁阀控制压力最高可达10 bar。
压力调节器用于管理外部压缩空气源。