

项目核心摘要
这款创新性的PiLiDAR扫描仪项目基于树莓派平台实现激光雷达环境测绘功能
激光雷达技术通过发射激光束扫描物理空间,精确构建三维数字模型
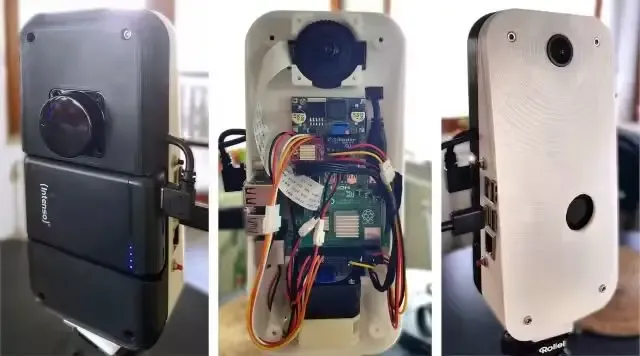
项目硬件配置包含树莓派4主板、专用摄像头、精密步进电机及激光雷达套件
你是否曾深入了解激光雷达扫描技术?这类设备在环境数据采集和三维场景重建领域具有革命性意义。若您对此技术充满好奇却不知如何入门,本树莓派项目将为您提供完整的实现方案,逐步指导您打造专属的激光雷达扫描系统。
基于树莓派的创新激光雷达解决方案
Hackaday平台报道的PiLiDAR项目已在GitHub开源,提供完整的源代码和编译指南。激光雷达(LiDAR)是"光探测与测距"技术的简称,其工作原理是向目标区域发射激光束,通过计算光束反射时间精确测绘空间结构。这种技术在三维环境建模领域应用广泛,甚至在游戏开发中用于创建沉浸式场景。
项目资源平台:
Hackaday项目页:https://hackaday.com/2025/04/18/a-pi-based-lidar-scanner/
GitHub代码库:https://github.com/PiLiDAR/PiLiDAR
PiLiDAR项目的核心技术特性
PiLiDAR项目将专业级激光雷达技术引入创客领域,尽管仍处于持续开发阶段,其GitHub已展示多项三维建模成果。系统功能模块包含:
激光雷达控制模块
兼容LDRobot LD06/LD19/STL27L的定制串行驱动
数据完整性CRC校验机制
基于曲线拟合的硬件PWM校准
2D实时可视化及数据导出(支持numpy/CSV格式)
全景成像系统
6K分辨率360°全景球面地图生成
采用Hugin软件实现鱼眼图像无缝拼接
EXIF数据自动读取保持曝光一致性
迭代优化色彩增益实现白平衡稳定
三维场景重建技术
基于角度偏移的2D平面三维化组装
全景图像采样顶点着色技术
Open3D可视化及多格式导出(PCD/PLY/e57)
全局配准结合ICP精调的多场景对齐
泊松表面重建(树莓派4运行较慢,建议PC端处理)
硬件配置要求
实现PiLiDAR系统需准备以下核心硬件:树莓派4开发板、树莓派高清摄像头模块、精密步进电机,以及LDRobot LD06/LD19/STL27L系列激光雷达套件。按照GitHub提供的详细指南,您可将客厅等物理空间转化为精细的三维数字模型。
激光雷达技术的创新应用
这项技术的应用价值远超家居环境扫描。例如将其集成到遥控车平台,可实现环境自动测绘并生成导航地图,完成从A点到B点的自主路径规划。相信树莓派开发者社区将创造更多突破性应用场景,持续推动技术创新。