
借助PXFMini和树莓派Zero,您可以亲手打造一款功能强大的自主漫游车,实现基于Linux的智能控制。
项目所需硬件与软件清单
本教程涉及的核心组件包括多种硬件设备和软件工具。
硬件设备清单
Erle Robotics PXFmini自动驾驶仪板 × 1块
树莓派 Zero单板计算机 × 1台
树莓派 2 Model B开发板 × 1台
树莓派3 Model B开发板 × 1台
软件应用及在线服务平台
APM飞行栈系统(ArduPilot开源项目) 项目地址:https://github.com/ArduPilot/ardupilot
专为无人机设计的Debian Linux文件系统 详细资源:http://ww1.erlerobotics.com/docs/Artificial_Brains_and_Autopilots/Operating_System_images/Debian.html?usid=23&utid=10554077391
项目总体概述
本教程旨在指导用户如何利用树莓派Zero构建Linux驱动的无人机系统。该设备整合了实时处理能力的Linux内核、Debian文件系统,以及专为PXFmini自动驾驶仪板优化的Dronecode APM飞行栈。所有这些组件均由Erle Robotics集成到其PXFmini操作系统镜像中,确保开箱即用的兼容性。
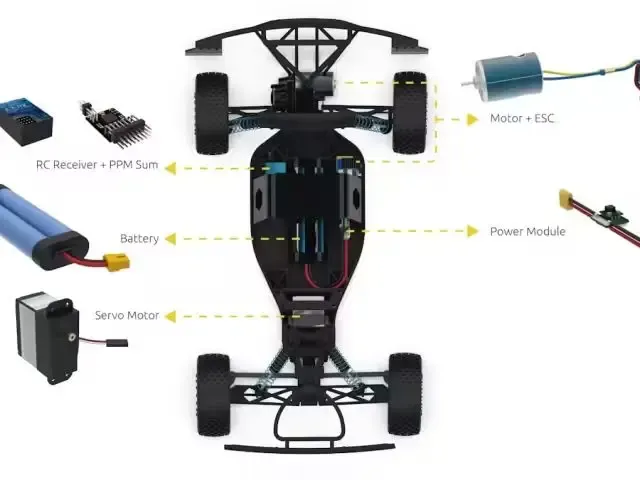
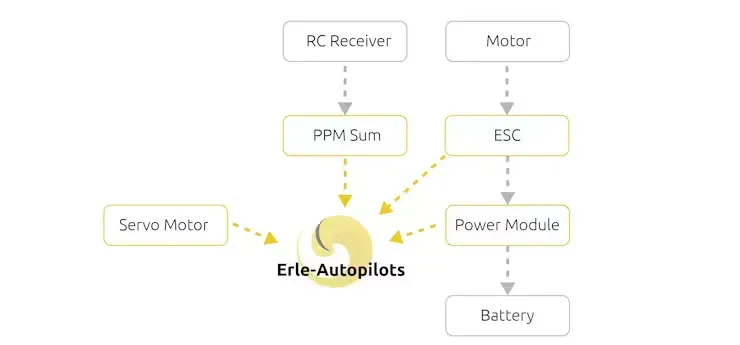
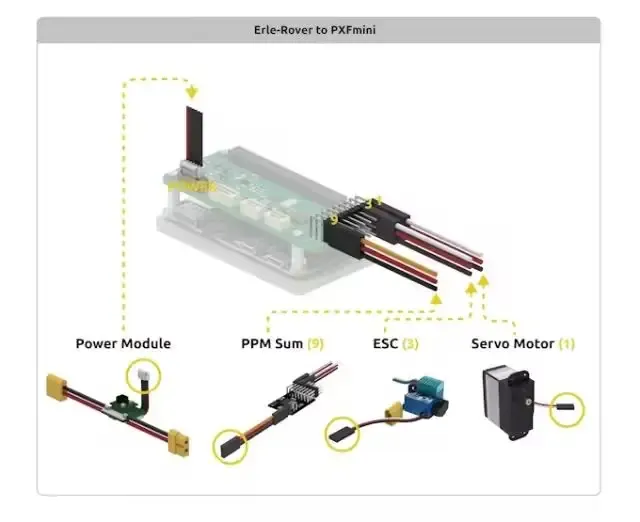
Erle-Rover漫游车基于以下核心元件组装而成。用户需要将这些组件连接到兼容的自动驾驶仪上以启用功能:

Pi0Rover漫游车及其内部组件示意图
Erle-Rover各模块的连接布局如下所示:
步骤一:自动驾驶仪硬件准备
预计耗时:约30分钟
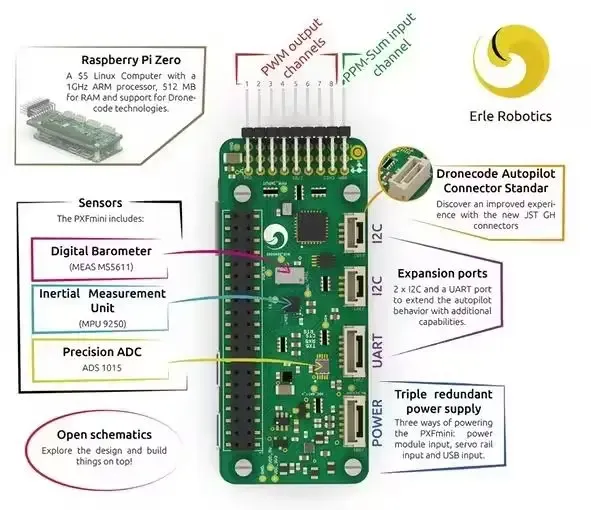
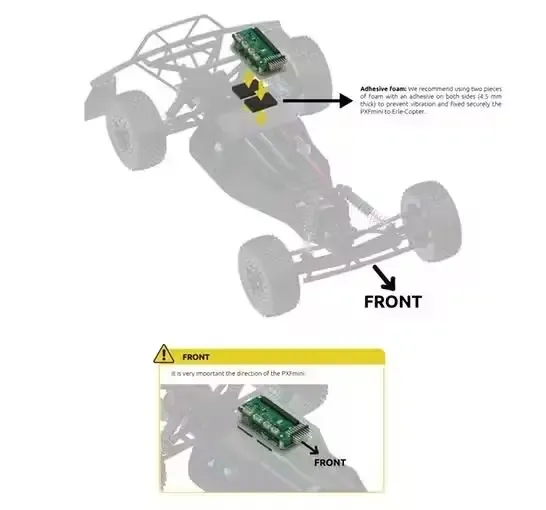
请遵循以下说明,将PXFmini扩展板正确安装到树莓派Zero主板上:

PXFmini(全称为PixHawk Fire Cape mini)是一款多功能控制器,适用于构建各类机器人和无人机平台。

硬件组装接近完成阶段,但用户仍需为树莓派Zero与PXFmini组合安装匹配的软件套件。这包括飞行控制栈、适配的内核驱动程序、开机自启动守护进程以及其他实用功能工具。
幸运的是,如果用户从Erle Robotics官方渠道购买PXFmini,将获得其Debian镜像的访问权限。这些镜像已预装所有必要组件,用户只需下载与PXFmini兼容的Debian镜像文件,并将其写入microSD存储卡即可。
步骤二:自动驾驶仪系统安装
预计耗时:约30分钟
用户可采用多种方法将自动驾驶仪(树莓派Zero与PXFmini组合)安装到漫游车底盘上。选择适合自身需求的安装方式后,将电源模块的JST GH连接线接入PXFmini。这样,当电池接入系统时,即可为整个自动驾驶仪提供稳定电力供应。
接下来,在自动驾驶仪上配置PWM信号通道。连接电子调速器(ESC)电缆时,将舵机1(负责转向控制)接入PWM通道1,并将ESC 2(负责油门调节)接入PWM通道2。
最后,用户需选择一种控制漫游车的方法。本教程推荐两种可行方案:
WiFi与游戏手柄组合:让自动驾驶仪通过USB加密狗创建专用WiFi网络(Erle Robotics镜像默认支持此功能),并使用标准游戏手柄通过地面控制站远程操控设备。
WiFi与ROS集成:用户若熟悉机器人操作系统(ROS),可借助ROS节点实现飞行模式可视化、状态监控和设备控制。ROS官网:https://www.ros.org/
传统遥控器方案:用户也可选用支持PPMSUM协议的遥控器,将其直接连接到自动驾驶仪的PPM-SUM输入通道。
如需构建飞行器版本,请参考以下扩展教程: https://www.hackster.io/12590/pi0drone-a-200-smart-drone-with-the-pi-zero-4fec08
相关项目参考
Pi0Boat项目:基于树莓派Zero的250美元智能水上交通工具 项目链接:https://www.hackster.io/erle-robotics/pi0boat-a-250-smart-aquatic-vehicle-with-the-pi-zero-b5acd8
Pi0drone项目:搭载树莓派Zero的200美元智能无人机系统 项目链接:https://www.hackster.io/12590/pi0drone-a-200-smart-drone-with-the-pi-zero-4fec08
原文出处地址: https://www.hackster.io/erle-robotics/pi0rover-a-smart-rover-with-the-pi-zero-885a07