在工业自动化与嵌入式开发的广阔领域中,LabVIEW(Laboratory Virtual Instrument Engineering Workbench)持续发挥着关键桥梁作用。由美国国家仪器(NI)打造的这一图形化编程平台,以其直观的拖拽式界面和卓越的数据处理能力,成为工程师与创客的首选工具。近期,当LabVIEW与树莓派Pico这一微型控制器相遇时,两者的结合展现出巨大潜力——正如创客Mohammad Reza Sharifi的“LabVIEW控制树莓派Pico监控机器人”项目所示,这种协作不仅简化了复杂系统的开发流程,还为硬件创新开辟了新路径。
LabVIEW的核心优势:串口通信与工业协议的整合之道
LabVIEW的核心吸引力源于其“所见即所得”的编程逻辑。开发者无需编写传统代码,仅需通过拖拽图标和连接数据线即可构建程序,特别适合快速原型开发和工业控制场景。
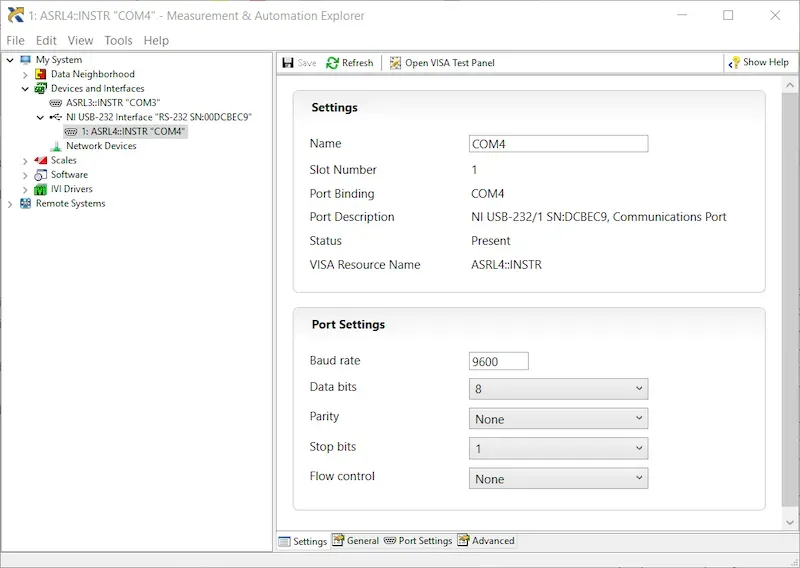
串口通信的强大工具:VISA库应用 LabVIEW内置的VISA(Virtual Instrument Software Architecture)库为串口通信提供一站式解决方案。用户仅需配置波特率、数据位、停止位等参数,即可轻松实现与硬件设备(如树莓派Pico)的数据交换。例如,在监控机器人项目中,HC-05蓝牙模块与LabVIEW的通信正是通过串口协议完成,实时传输控制指令与传感器数据。
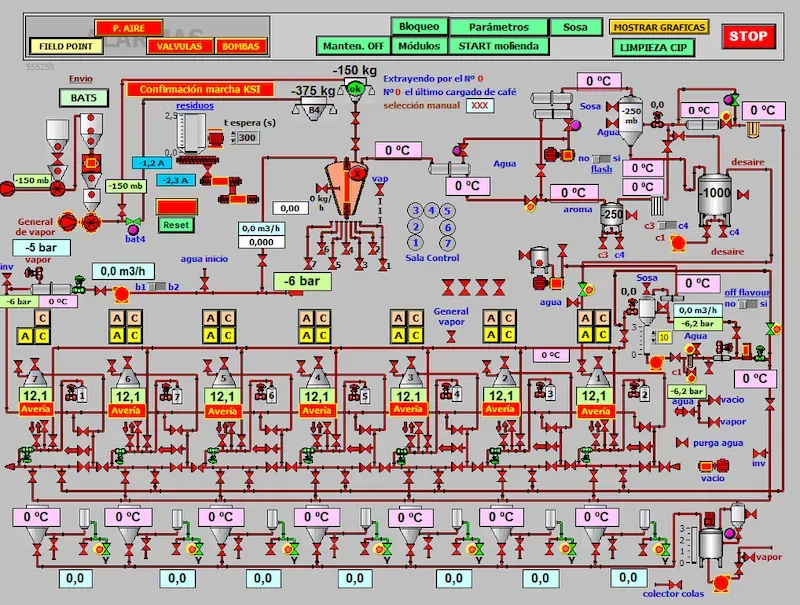
工业协议开发的进阶探索 针对工业级应用,LabVIEW原生支持Modbus、OPC UA、CAN总线等协议。借助预置函数库,开发者能迅速搭建符合工业标准的通信接口,例如连接PLC、传感器网络或机器人控制系统。这一特性使LabVIEW与树莓派Pico的组合不仅适用于创客项目,还可扩展至工业自动化原型开发。
性能优化的关键技巧 尽管LabVIEW以易用性著称,但在处理高吞吐量数据或复杂算法时仍需优化:
循环结构优化:避免在“While循环”内堆积过多操作,优先采用“生产者-消费者”模式分离数据采集与处理任务。
并行执行机制:利用LabVIEW的多线程特性,将GUI更新、数据解析、硬件控制分配至独立线程。
内存管理策略:通过“数据流”编程减少冗余变量,并启用“执行追踪工具”定位性能瓶颈。
LabVIEW与树莓派Pico的协同价值解析
树莓派Pico作为一款低成本、高灵活性的微控制器,其核心优势在于硬件扩展能力——通过GPIO引脚连接电机、传感器、通信模块等外设。而LabVIEW的强项则是上层逻辑设计与人机交互,两者形成高度互补:
快速GUI控制界面开发 LabVIEW能在数小时内构建包含按钮、图表、视频流的控制面板(如监控机器人的导航界面),省去传统编程中繁琐的UI代码编写过程。
无缝硬件集成能力 通过串口、蓝牙或Wi-Fi,LabVIEW可直接向树莓派Pico发送指令,而Pico的MicroPython固件负责解析指令并驱动硬件(如L298电机驱动模块)。
教育与工业的双重潜力 在教育领域,这种组合降低了学生学习嵌入式开发的门槛;在工业场景中,LabVIEW的稳定性与树莓派的低成本特性使其成为自动化设备原型的理想选择。
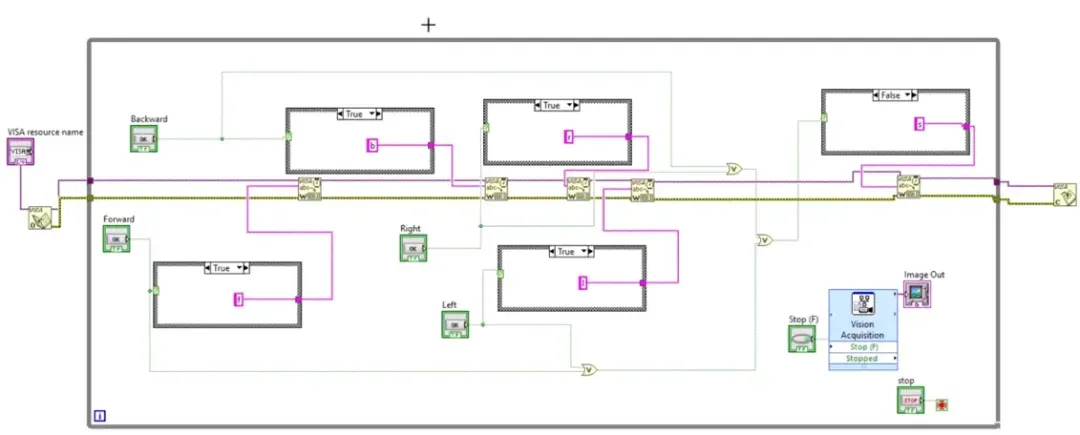
“LabVIEW+Pico监控机器人”项目的深度剖析
在Mohammad Reza Sharifi的开源项目中,树莓派Pico充当机器人的“核心大脑”,而LabVIEW则扮演“远程指挥官”角色。以下是项目的关键技术亮点:
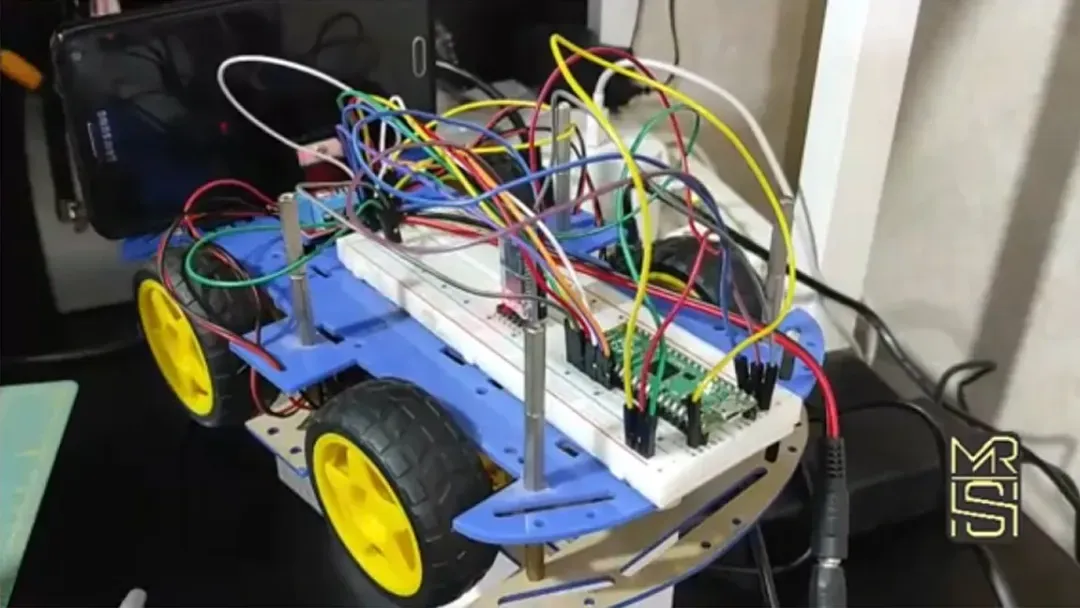
硬件架构设计
树莓派Pico:作为主控单元,通过MicroPython脚本接收LabVIEW指令,控制L298N电机驱动模块驱动四轮底盘。
HC-05蓝牙模块:实现Pico与LabVIEW GUI的无线通信,传输方向指令(前进、后退、转向)。
智能手机摄像头:通过Wi-Fi或USB连接实时回传视频流至LabVIEW界面,构成监控系统的“视觉核心”。
软件协作流程详解
LabVIEW GUI:用户点击界面按钮后,LabVIEW将指令编码为字符串,经蓝牙发送至Pico。
Pico固件:MicroPython脚本解析指令,生成PWM信号驱动电机,并管理电源与传感器状态。
视频流整合:手机摄像头画面通过第三方应用(如IP摄像头)推流至LabVIEW界面,实现“第一人称视角”操控。
项目的可扩展性 该框架可轻松延伸至更多应用场景:
增加温湿度传感器、超声波避障模块,升级为环境监测机器人。
结合OpenCV算法,在LabVIEW中实现人脸识别或目标跟踪功能。
替换为工业协议(如Modbus TCP),打造车间巡检设备原型。
开源资源获取与项目参与途径
Sharifi已将项目的完整代码、接线图及LabVIEW VI文件开源至GitHub仓库,创客可直接复现或进行二次开发: 🔗 GitHub项目地址: https://github.com/mohammadreza-sharifi/Control-Surveillance-Raspberry-Pi-Pico-Robot-using-NI-LabVIEW